pyworld3
![]()
The World3 model revisited in Python
- Install & Hello World3
- How to tune your own simulation
- Licence
- How to cite PyWorld3 with Bibtex
- References & acknowledgment
PyWorld3 is a Python implementation of the World3 model, as described in the book Dynamics of Growth in a Finite World. This version slightly differs from the previous one used in the world-known reference the Limits to Growth, because of different numerical parameters and a slightly different model structure.
The World3 model is based on an Ordinary Differential Equation solved by a Backward Euler method. Although it is described with 12 state variables, taking internal delay functions into account raises the problem to the 29th order. For the sake of clarity and model calibration purposes, the model is structured into 5 main sectors: Population, Capital, Agriculture, Persistent Pollution and Nonrenewable Resource. For a better understanding of variables and their relations, one can refer to this.
Install and Hello World3
Install pyworld3 using pip:
pip install git+https://github.com/mBarreau/pyworld3
Run the provided example to simulate the standard run, known as the Business as usual scenario:
import pyworld3
pyworld3.hello_world3()
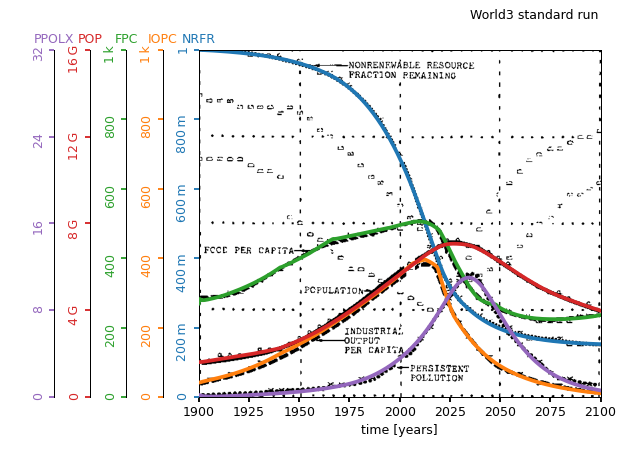
As shown below, the simulation output compares well with the original print. For a tangible understanding by the general audience, the usual chart plots the trajectories of the:
- population (
POP) from the Population sector, - nonrenewable resource fraction remaining (
NRFR) from the Nonrenewable Resource sector, - food per capita (
FPC) from the Agriculture sector, - industrial output per capita (
IOPC) from the Capital sector, - index of persistent pollution (
PPOLX) from the Persistent Pollution sector.
How to tune your own simulation
One simulation requires a script with the following steps:
from pyworld3 import World3
world3 = World3() # choose the time limits and step.
world3.set_world3_control() # choose your controls
world3.init_world3_constants() # choose the model constants.
world3.init_world3_variables() # initialize all variables.
world3.set_world3_table_functions() # get tables from a json file.
world3.set_world3_delay_functions() # initialize delay functions.
world3.run_world3()
You should be able to tune your own simulations quite quickly as long as you want to modify:
- time-related parameters during the instantiation,
- constants with the
init_world3_constantsmethod, - nonlinear functions by editing your modified tables
./your_modified_tables.jsonbased on the initial json filepyworld3/functions_table_world3.jsonand callingworld3.set_world3_table_functions("./your_modified_tables.json").
How to control your simulation
Controls are time functions defined with *_control. Real control values are stored in the world (or sector) as an array under the name *_control_values.
For open loop control, this is relatively easy and one can adapt the following code:
from pyworld3 import World3
icor_control = lambda t: min(3 * np.exp(-(t - 2023) / 50), 3) # This is the open loop control function
world3 = World3(year_max=2100)
world3.set_world3_control(icor_control=icor_control)
world3.init_world3_constants()
world3.init_world3_variables()
world3.set_world3_table_functions()
world3.set_world3_delay_functions()
world3.run_world3(fast=False)
The variable t is the time in years (note that it does not start from 0 but depends on your simulation parameters).
Close-loop control works similarly but one must define a control function with 3 arguments instead:
from pyworld3 import World3
icor_control = lambda t, world, k: world.fioac[k] # This is the feedback control function
world3 = World3(year_max=2100)
world3.set_world3_control(icor_control=icor_control)
world3.init_world3_constants()
world3.init_world3_variables()
world3.set_world3_table_functions()
world3.set_world3_delay_functions()
world3.run_world3(fast=False)
In that case, t is the same argument as before, world refers to the instance of the object (it can be a sector as well) and k is the index to get the value of a variable at last step.
Licence
The project is under the CeCILL 2.1 licence, a GPL-like licence compatible with international and French laws. See the terms for more details.
How to cite PyWorld3 with Bibtex
To cite the project in your paper via BibTex:
@softwareversion{vanwynsberghe:hal-03414394v1,
TITLE = ,
AUTHOR = {Vanwynsberghe, Charles and Barreau, Matthieu},
URL = {https://hal.archives-ouvertes.fr/hal-03414394},
YEAR = {2024},
MONTH = Jan,
SWHID = {swh:1:dir:9d4ad7aec99385fa4d5057dece7a989d8892d866;origin=https://hal.archives-ouvertes.fr/hal-03414394;visit=swh:1:snp:be7d9ffa2c1be6920d774d1f193e49ada725ea5e;anchor=swh:1:rev:da5e3732d9d832734232d88ea33af99ab8987d52;path=/},
LICENSE = {CeCILL Free Software License Agreement v2.1},
HAL_ID = {hal-03414394},
}
References and acknowledgment
- Meadows, Dennis L., William W. Behrens, Donella H. Meadows, Roger F. Naill, Jørgen Randers, and Erich Zahn. Dynamics of Growth in a Finite World. Cambridge, MA: Wright-Allen Press, 1974.
- Meadows, Donella H., Dennis L. Meadows, Jorgen Randers, and William W. Behrens. The Limits to Growth. New York 102, no. 1972 (1972): 27.
- Markowich, P. Sensitivity Analysis of Tech 1-A Systems Dynamics Model for Technological Shift, (1979).